Knightshade
Well-Known Member
So you are going on a long trip and you will be passing through several small towns. You are saying that you will research the local traffic laws of each one?
Random tiny town I'm driving straight through? No because I'm not doing any driving super-local laws are likely to matter for... but any place I'll actually be driving around and parking in? Yeah- I want to know at minimum what's legal for red lights and parking.
Humans can be relied upon to forget these signs, not notice them at all, or not understand what they mean. FSD doesn't have to be perfect any more than a human driver has to be perfect.
They do though- because humans ALSO know how to correct a mistake if they missed an important sign. FSD just sits at the road closed sign and does nothing (if it even stops for it- again V11 anyway there's lots of examples where it wasn't going to).
Forgetting a no passing sign would get the RT pulled over and possibly banned from the roads (since it would demonstrably be failing to obey all traffic laws- something required for >L2 vehicles in the states that allow them on the roads.
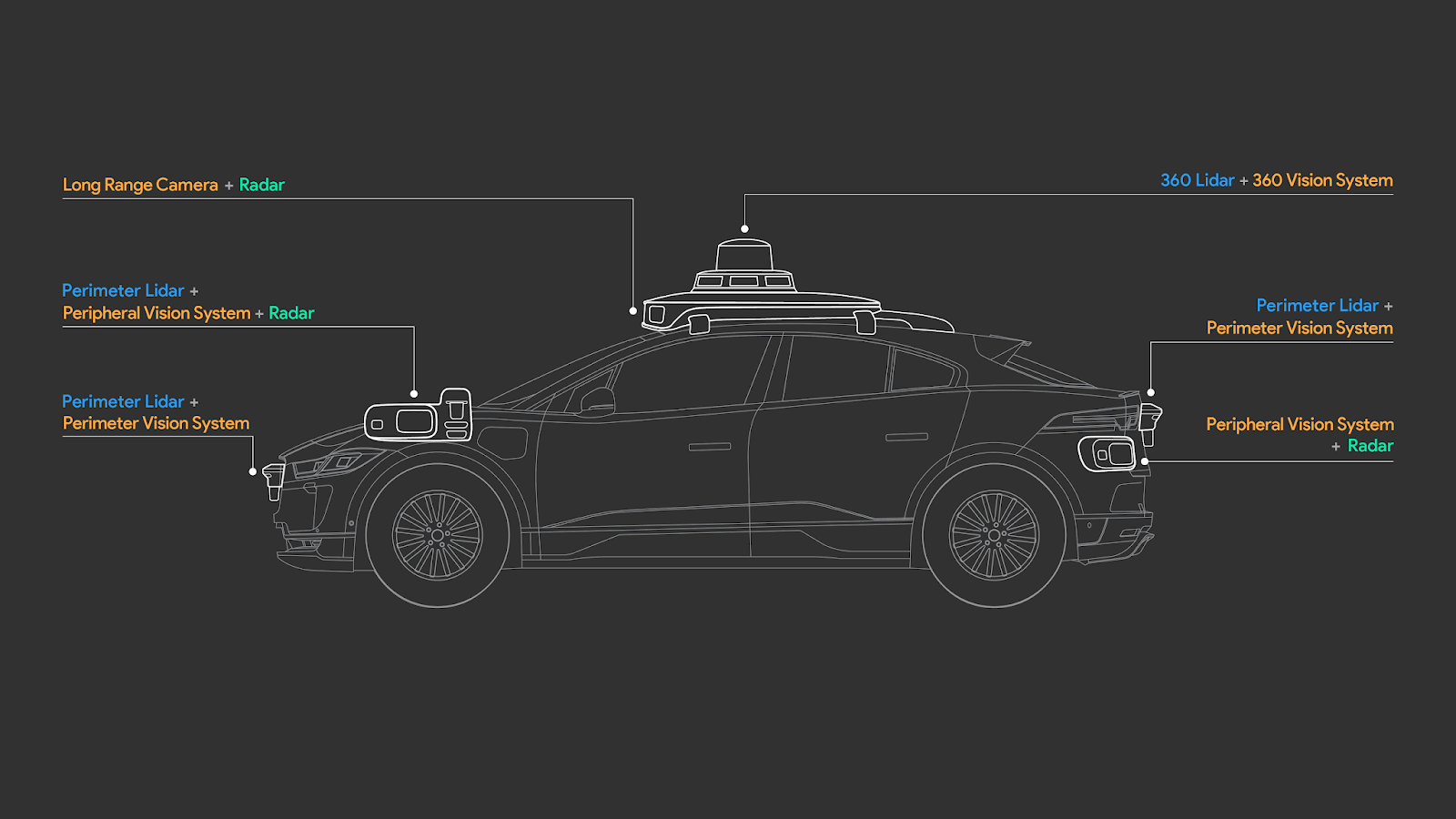
But also remember that I'm mainly talking about what it takes to start a robotaxi service in a single city. All this can be taken care of the same way it is done today with Waymo. With Waymo, there is some level of babysitting by a central command center.
This is 1000% the opposite of everything Tesla has ever said on how they want to do robotaxis though, as many have pointed out to you already